从头越,苍山如海,残阳如血。
Subgradient
定义 (subgradient; subdifferential). 对于在 $p$ 维欧式空间中的凸开子集 $U$ 上定义的实值函数 $f:U \Rightarrow \mathbb{R}$,一个 $p$ 维向量 $v$ 称为 $f$ 在一点 $x_0 \in U$ 处的 $\mbox{subgradient}$,如果对于任意 $x \in U$,满足
\[f(x)-f(x_0) \geq v \cdot (x-x_0) \qquad (1)\]且由在点 $x_0$ 处的所有 subgradient 所组成的集合称为 $x_0$ 的 subdifferential,记为 $\partial f(x_0)$。上面的x是对定义域内任意的 x 来说的。
注意 subgradient 和 subdifferential 只是对凸函数定义的。例如一维的情况,$f(x)=\mid x \mid$,在 $x=0$ 处的 $\mbox{subdifferential}$ 就是 $[-1,1]$ 这个区间(集合)。
注意在 $f$ 的 $\mbox{gradient}$ 存在的点,$\mbox{subdifferential}$ 将是由 $\mbox{gradient}$ 构成的一个单点集合。这样就将 $\mbox{gradient}$ 的概念加以推广了。这个推广有一个很好的性质。
性质
性质 (condition for global minimizer). 点 $x_0$ 是凸函数 $f$ 的一个全局最小值点,当且仅当 $0 \in \partial f(x_0)$.
证明很简单,将 $0 \in \partial f(x_0)$ 带入到式 $(1)$ 中就可以了。
proximity operator
对于一个凸函数 $\varphi : \mathcal{H} \Rightarrow \mathbb{R}$,proximity operator $\mbox{prox}_{\varphi}:\mathcal{H}\Rightarrow\mathcal{H}$ 有如下定义:
添加一个参数:
\[\mbox{prox}_{\gamma\varphi}(x)=\operatorname {arg} \min_{u\in {\mathcal {H}}} \varphi (u) + \frac{1}{2\gamma} \mid\mid u-x \mid\mid_2^2\]其中 $\gamma>0$,表示对于给定点 $x$,找到最优的点 $u=\mbox{prox}_{\gamma\varphi} (x)$,使得 $\varphi(u)+\frac{1}{2\gamma}\mid\mid u-x \mid\mid_2^2$ 最小。这里 $\gamma$ 表示一个权衡。这个解是肯定存在的,对于凸函数:well-defined because of the strict convexity of the $l_2$ norm.
栗子:
- $\varphi(x)=0: \mbox{prox}_{\gamma\varphi}(x)=x$
- $\varphi(x)=I_C(x) \; \mbox{(indicator function of C): } \mbox{prox}_{\varphi} \mbox{ is projection on C }$
- $\varphi(x)= \mid\mid x\mid\mid_1 : \mbox{prox}_{\varphi} \mbox{is shrinkage (soft threshold) operation}$
$I_C(x)$ 表示如果 $x$ 在集合中则函数值为 $0$,否则为正无穷;$\varphi(x)= \mid\mid x\mid\mid_1$的情况下一节进行进一步讨论。
并且,当 $x = \mbox{prox}_{\gamma\varphi}(x)$ 时,得到最优解。也就是不动点是最优解(通过求不动点的方式迭代求解)。
soft threshold
$R(x)=\varphi(x)= \mid\mid x\mid\mid_1$,根据性质:若 $x_0$ 是凸函数 $f(x)$ 的极值点,那么 $x_0 \in \partial f(x)$,得,
\[\begin{aligned}x^+ = u=\operatorname {prox} _{R}(x) &\iff 0\in \partial \left(R(u)+{\frac {1}{2 \gamma}}\mid\mid u-x\mid\mid_{2}^{2}\right)\\ &\iff 0\in \gamma \partial R(u)+u-x\\ &\iff x-u\in \gamma\partial\mid u\mid\\ &\iff u\in x-\gamma\partial\mid u\mid \end{aligned}\]对于绝对值函数,仅在 $0$ 处不可导,即,
\[\partial |x_{i}|={\begin{cases}1, &x_i > 0 \\ -1, &x_i <0 \\ [-1,1], &x_i=0 \end{cases}}\]那么, \((\mbox{prox}_{\gamma R}(x))_i = \begin{cases} x_i - \gamma &\mbox{ } x_i \geq \gamma \\ 0 &\mbox{ } \mid x_i \mid \leq \gamma \\ x_i + \gamma &\mbox{ } x_i \leq -\gamma \end{cases}\)
这里仅对$u=0$时进行讨论:
$\because u\in x-\gamma\partial\mid u\mid \And\ \partial \mid 0\mid=[-1,1]\therefore u=0 \in x-[-\gamma, \gamma] \Rightarrow 0 \in x+[-\gamma, \gamma]$,也就是说0在区间$x+[-\gamma, \gamma]$内,则$x \in [-\gamma, \gamma]$。
记 soft thresholding operator 为 $S_{\gamma }(x)= \mbox{prox} _{\gamma \mid\mid \cdot \mid\mid_1}(x)$
那么如果在 $l_1$ 范数前面加上正则化的系数 $\lambda$,即 $R(x)=\lambda \mid\mid x \mid\mid$,又会发生生么变化呢?
\[(\mbox{prox}_{\gamma R}(x))_i = \begin{cases} x_i - \lambda \gamma &\mbox{ } x_i \geq \lambda \gamma \\ 0 &\mbox{ } \mid x_i \mid \leq \lambda \gamma \\ x_i + \lambda \gamma &\mbox{ } x_i \leq -\lambda \gamma \end{cases}\]可以发现,如果你待求得机器学习问题确定了(损失+正则化及其系数),那么 $\lambda$ 就是一个定值,而 $\gamma$ 看你如何取了。从这里可以导出近端梯度下降方法。
Proximal Gradient Method
待求解问题:
\[\min_{x\in \mathcal{H}} F(x) + R(x)\]其中,$F(x)$ 凸、可导,$R(X)$ 凸;
那么在 $x$ 出取得极值的条件是:$0 \in \partial(F+R)(x)$.
那么,$x$ 的递推公式是:$x^{k+1}=\mbox{prox}_{\gamma R}(x^k-\gamma \nabla F(x^k))$.
当 $\hat x=\mbox{prox}_{\gamma R}(\hat x-\gamma \nabla F(\hat x))$ 时, $\hat x$ 使得 $F(x)+R(x)$ 最小化。
证明
另 $x^+=\mbox{prox}_{\gamma h}(x-\gamma \nabla g(x))$,那么需证明
\[x^+= \mbox{arg}\min_u\left(g(u)+h(u)\right)\]证,
\[\begin{align}x^+ &= \mbox{prox}_{\gamma h}\Big(x-\gamma \nabla g(x)\Big) \\ &= \mbox{arg}\min_u \left(h(u)+\frac{1}{2\gamma}\mid\mid u-x+ \gamma \nabla g(x) \mid\mid_2^2\right) \\ &= \mbox{arg}\min_u \left(h(u)+ \frac{\gamma}{2}\mid\mid \nabla g(x)\mid\mid_2^2 + \nabla g(x)^T(u-x)+ \frac{1}{2\gamma}\mid\mid u-x \mid\mid_2^2\right) \\ &= \mbox{arg}\min_u \left(h(u)+ g(x) + \nabla g(x)^T(u-x) +\frac{1}{2\gamma}\mid\mid u-x \mid\mid_2^2\right) \\ & \approx \mbox{arm}\min_u \Big(g(u)+h(u)\Big) \end{align}\]后两式的变化是因为,变化的两项都与 $u$ 无关,然后通过二阶泰勒展开近似得到目标函数。
也就是说此类问题的通解公式为:$x^{k+1}=\mbox{prox}_{\gamma R}(x^k-\gamma \nabla F(x^k))$.
下面证明,二阶泰勒近似成立:
凸函数下界
affine lower bound from convexity 凸函数的仿射下界:
证明:
带有拉格朗日余项的泰勒展开:
\[g(u)=g(x)+\triangledown g(x)^T(u-x)+\frac{1}{2}(u-x)^T\triangledown ^2g(\xi)(u-x)\]其中,$\xi \in (x,u)$.因为凸函数的二阶导大于 $0$ (或者正定矩阵),得证。
凸函数的二次上界
\[g(u) \leq g(x)+ \triangledown g(x)^T(u-x) +\frac{L}{2}\mid\mid u-x \mid\mid_2^2 \quad \forall x,u\]证明:
如果函数 $\triangledown g(x)$ 是利普希茨连续,其中的常量用 $L$ 表示:
\[\mid \mid \triangledown g(x \prime) -\triangledown g(x)\mid \mid _2 \leq L \mid \mid x \prime -x\mid \mid _2 \quad \forall x \prime, x\]那么,拿一维的情况来说,
\[\mid \triangledown g(x \prime) -\triangledown g(x)\mid \leq L \mid x \prime-x\mid\]则,
\[\frac{\mid \triangledown g(x \prime) -\triangledown g(x)\mid }{\mid x \prime-x\mid } \leq L\]取极限得:$\mid \triangledown^2g(x \prime) \mid \leq L$,且凸函数二阶导大于零,所以:
\[g(u) \leq g(x)+ \triangledown g(x)^T(u-x) +\frac{L}{2}\mid \mid u-x\mid \mid _2^2 \quad \forall x,u\]也就是说之前的 $\gamma \in [0, \frac{1}{L}]$.
线性搜索
近端梯度下降
梯度下降的时候,一般设置的步长都较小,因为害怕震荡。在我之前ML中的数学一文中也试图讨论梯度下降步长的阈值,大于阈值就会引起震荡,但是不好确定。
那是不是就没有其他方法来,得到合适的步长求加快收敛的速度呢?最简单的方法就是线性搜索。这里先做一个通俗的解释:得到负梯度之后(函数值减小的方向),先令步长为 $t=1$,计算一下走完这一步之后的函数值,如果函数值增大了,说明步子大了,令步长 $t = \beta t,\beta \in (0,0.5)$,直到在某一次测试的时候函数值首次减小。这是才按照当前步长,进行一次梯度下降。
那么,这和我们当前与解决的问题有什么联系呢?
首先,对于函数 $\triangledown F(x)$ 其利普希茨常量L,不一定知道。那也就是说式 $(1)$ 中的 $\gamma$ 不知道,那就没法继续了。假如,有幸你遇到的问题对应的该常量已知,从其泰勒展开二阶近似的证明我们知道,只是求得了每一步近似函数的最小值点。也就是式 $(1)$ 给出的解,我们不好得到,或者得到有些许偏差。
注意,近端算法肯定有类似式 $(1)$ 用到次梯度的一步,那么我们可以将其结果进行转化。在进行近端梯度下降,用前一步的结果(这里说成立足点x)减去当前的结果,那就得到了一个方向。这个方向是式 $(1)$ 求得的 $R(x)$ 降低最快的方向。那么,在这个方向上走多远呢,使用线性搜索使得 $F(x)$ 的值首次下降,而前一个立足点x减去步长之后就成了新的立足点x+1,迭代直到收敛。可以看到每一次函数值都在降低,那么就一定会收敛。
其实,本文一直将最小化的问题表示为 $\min_x g(x) + h(x)$ 并非F(x)和R(x)将就一下吧。
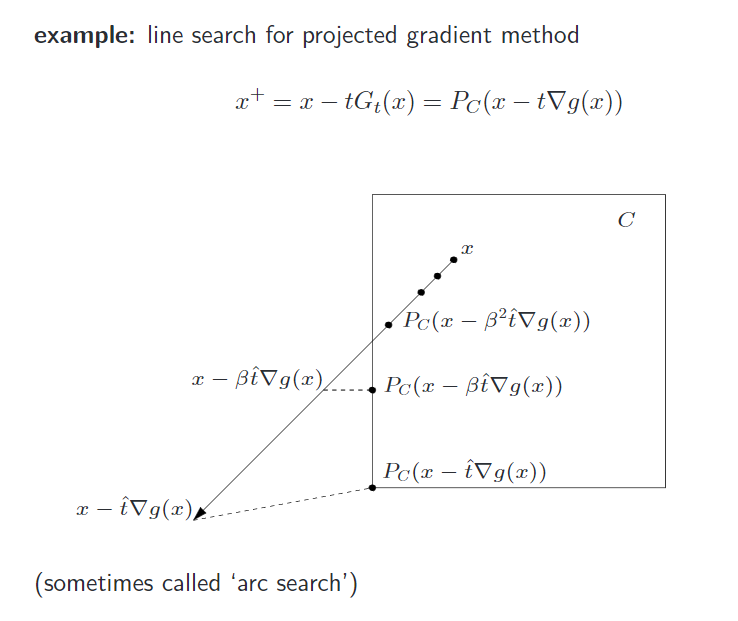
每一个黑点都是可能被选则的立足点,但是上图这是没有 $F(x)$ 的情况下。有 $F(x)$ 结果类似,但会有不同。
符号化
将 $\gamma$ 替换为 $t$,我们的原始问题是最小化g(x)+h(x),那么迭代下面步骤就可以,只不过每步的 $t_k$ 不好确定。
对公式进行如下的变换:
\[x^{(k)}=x^{(k-1)}-t_k G_{t_k}(x^{(k-1)})\]其中,
\[G_t(x)=\frac{1}{t}(x-\mathbf {prox}_{th}(x-t \triangledown g(x)))\]那么,线面就是线性搜索来确定 $x^+ = x - tG_t(x)$ 中的步长t:
start at some, $t:= \hat t$,repeat,$t:=\beta t$ (with 0<β<1), until:
LASSO
求解 $\mbox{L}1$norm 正则化的问题,
则只需将公式变成,
\[x^{k+1}=\mbox{prox}_{\lambda \mid\mid\cdot\mid\mid_1}(x^k-\gamma \nabla F(x^k))\]当然,还是要使用线性搜索,毕竟费的这么长时间才总结完。(╯°Д°)╯︵ ┻━┻ 摆好摆好不然下次没得掀了 ┬─┬ ノ(‘-‘ノ) .
小结
本文尚未完成问题:
二阶泰勒近似,使用了 利普希茨 条件,但是这一部分尚没有搞清楚有一个参考文献中,设置了类似于Proximal Gradient Method的步长,个人偏向不用设置步长
上面两个深坑,均已填 T_T 2016.08.21 更新。
待学习:Regularization and VariableSelection via the Elastic Net
这个就是一范数、二范数一起用,但是这样的优点还没有了解,但是求解方法就是以上的方法了。看了也会另开一篇再写了~~~
附加
$\mbox{l}1$norm 稀疏化的一个解释(非明了的图形),待解决问题即 $LASSO$ 部分所列问题,若在 $0$ 处, $F’(x)<\gamma \mid_{x=0}$,则 $0 \in \partial \left(F(x)+\gamma \mid\mid x \mid\mid_1 \right) \mid_{x=0}$,则得稀疏解。
$\mbox{l}2$norm 则更倾向于平滑,待解决问题:
如果,变量 $A$ 和 $B$ 完全相关,则最后 $w_1=w_2$,因为此时 $\mbox{l}2$norm 才最小。
至于 $l1$ 中的多重共线性问题,究竟什么情况那个变量系数压缩为 $0$,学习之后再填吧。。。

References
二次更新添加: